
The Tele-Robotic Intelligent Nursing Assistant (TRINA)
Jane Li, Peter Moran, Carrina Dong, Ryan Shaw, Kris Hauser
Summary
During outbreaks of contagious diseases, healthcare workers are at high risk for infection due to routine interaction with patients, handling of contaminated materials, and challenges associated with safely removing protective gear. This project is developing the Tele-Robotic Intelligent Nursing Assistant (TRINA), a remote-controlled robot to address these challenges. Such robots could perform common nursing duties inside hazardous clinical areas, which could reduce infection risk to healthcare workers by minimizing exposure to contagions and other biohazards.
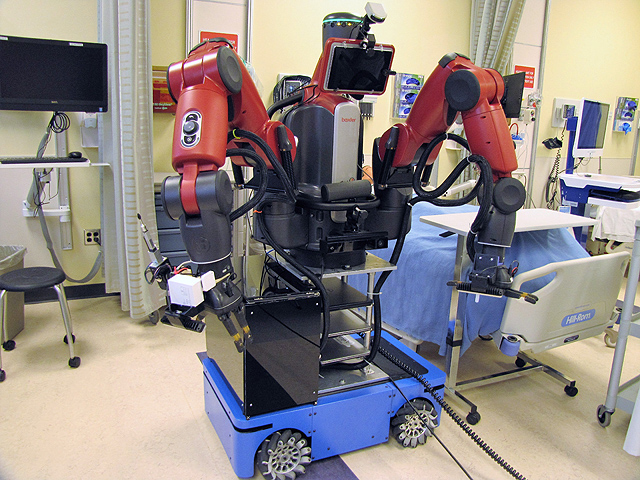
TRINA consists of a mobile manipulator robot, a human operator's console, and software for connecting the operator's input to the robot. Ideally, the robot should act as a "surrogate body" so that the operator can perform any task that he/she could normally perform. However, robot actuation and sensing hardware is far from the capabilities of the human body. There are a number of ongoing research challenges including hardware that provides human-level strength, dexterity, perceptual sensitivity, and situational awareness. Moreover, TRINA has 28 independently controllable degrees-of-freedom, and coordinating these movements can be quite challenging.
Recent tests show the robot successfully completing approximately 60% of nursing tasks at an average of 20x slower than human performance. Enhancing the capability of the robot and its intuitiveness for the operator is a major effort and poses engineering, scientific and clinical application challenges.
The group is investigating several aspects of the tele-robotic nursing problem, including intuitive input devices, improved contextual awareness, and operator assistance algorithms that automate or partially-automate tedious and error-prone tasks. External collaborators are also studying the use of mobile sensors for providing rich information to the nurse, methods for enhancing the robot's manipulation capabilities, and designing disposable protective coverings (link to TRINA self-doffing project).
- Z. Li, P. Moran, C. Dong, R. Shaw, and K. Hauser. Development of a Tele-Nursing Mobile Manipulator for Remote Care-giving in Quarantine Areas. IEEE Int'l. Conf. on Robotics and Automation (ICRA), May 2017.


- J. Li, Z. Li and K. Hauser. A Study of Bidirectionally Telepresent Tele-action During Robot-Mediated Handover. IEEE Int'l. Conf. on Robotics and Automation (ICRA), May 2017.



NSF RAPID #IIS-1513221
NSF CAREER #1253553

